- Published on
- |0|
ROS - A Primer
- Authors

- Name
- Abhishek Shree
- @Abhishek
Starting to learn ROS can be a bit of a challenge. There are tons of new terminology and concepts to learn and this blog is designed to help you get started.
Why ROS?
ROS is used as a framework for robot software development, by that I mean it is used for abstraction of hardware, low-level device control, passing information between processes, and several other niche areas. While all of it can possibly be implemented using bare metal C++ (Cornell does it pretty well), it is a lot easier to use when you are using a toolchain which is pretty much industry standard.
Structure
- Nodes: Base unit in ROS, a node is a process that runs on a computer. It uses a ROS client library (rospy, roscpp) to communicate with other nodes. Commands
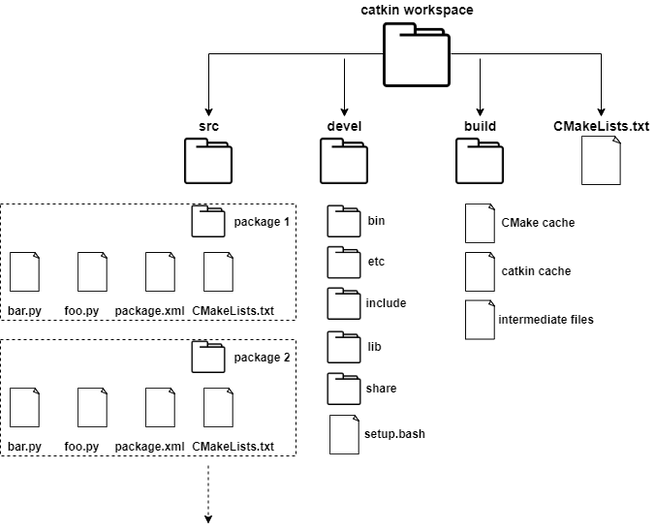
rosnodehelps you manage nodes,rosrunhelps you run nodes. - Packages: A package is a low level, independent, shareable directory that contains files such as source code, configuration files, message descriptions, service descriptions, libraries, data, and build files. Anologous to a package in NodeJS (not precisely tho). A package can contain multiple nodes. A good read.
- Workspace: A workspace is a directory that contains multiple packages.
- Topics: A topic is a communication channel between nodes. It is a way to pass information between nodes. Could be some sort of sensor data, or a command to move a robot. Command
rostopichelps you manage topics. - Messages: Topics are categorised by the information they contain. This information is called a message. For example, a topic publishing camera data and another publishing velocity would have different messages (kindof obvious right?).
- Publisher and Subscriber: A publisher publishes messages, a subscriber subscribes to messages, through topics.
- Services: A service is a way to communicate with other nodes. It is a way to request information from other nodes. Could be a way to request a robot to move, or a way to request a robot to stop. Resemble the standard client-server model. Here, one node registers a service, and another node can request the service and get a response, two-way communication.
- Client and Server: A client is a node that requests a service, and a server is a node that provides the service.
- Parameter Server: A parameter server is a node that stores parameters. Parameters are variables that can be set by a node, and read by other nodes, like a shared dictionary. Must read: this.
- Master: It kind of acts as a DNS server for your nodes, so they can retrieve each other. Keeps a record of all the nodes that are running (can be from different packages). It tracks publishers and subscribers to topics as well as services. The command
roscorestarts the master, along with the logging and parameter server. Cannot use ROS without the master running.
NOTE: The publish/subscribe framework is a many-to-many system where multiple nodes can publish to and subscribe from a topic. It is also a one-way transport of information. To alleviate these problems and to facilitate one-to-one, two-way transport of short-lived information, the service framework is used.
Utilities
rqt: rqt is a package that lets you visualise the current network of nodes and topics in ROS.roslaunch: Lets you run launch files, which contain a list of nodes and topics to be run (very convenient for running multiple nodes).rosbag: Lets you create and manage bags of data, consisting of messages from topics.urdf: Lets you create and manage URDF files, which are used to describe the robot's kinematics.gazebo: A simulation tool to work with the bots in an artificial environment with physics similar to the use-case and customisable.catkin: A build system (if you feel like criticizing ROS, start here) for ROS, which is a lot more convenient than the standard CMake.tf: A library for transforming between coordinate frames.rviz: A visualization tool for ROS. Displays a lot of information about the system i.e. nodes, topics, messages, etc.dynamic_reconfigure: A library for configuring parameters of ROS nodes. It can help you to change the parameters of a node without restarting the node, i.e. at runtime. To understand how to use it, read this.
Found this glossary to be helpful occasionally.
Resources
- ROS Wiki: The official ROS wiki.
- Maybe: A course, but prefer the wiki.
- Another course with better examples: Still prefer the wiki first.
- To have a look on how things work
It is pretty important to go through the ROS wiki thouroughly.